
Введение
Если ваш Braava Jet 240 ведет себя нестабильно, избегает невидимых препятствий, кружит вокруг невидимых ножек стола и движется вперед с быстрой остановкой, возможно, требуется регулировка датчиков положения свободно плавающей платформы.
Эта методика не основана на знании конструкции Braava Jet 240. Это может привести к тому, что ваш Braava Jet 240 будет окончательно выведен из строя. Действуйте на свой страх и риск.
Похоже, что магниты, обведенные красным, образуют магнитную половину пары индуктивных датчиков, которые отслеживают перемещения свободно плавающей платформы при соприкосновении передней крышки Braava Jet 240 со стенами или другими препятствиями. Магниты проходят чуть ниже нижней части корпуса материнской платы. Я подозреваю, что в основании системной платы находятся индукционные катушки, которые воспринимают движение магнитов.
Об индуктивных датчиках мы знаем одно: эффективность датчика снижается по мере удаления магнита от катушки детектора. Если свободно плавающая платформа со временем меняет форму, один из магнитов может сместиться настолько далеко от катушки детектора, что это приведет к ошибочным показаниям.
Прежде чем снимать корпус материнской платы, проверьте смещение магнита и катушки индуктивности, просунув кусочки бумаги разной толщины между верхней частью магнита и нижней частью корпуса материнской платы.
В моем Braava Jet 240 одно из смещений было заметно больше другого.
Идея заключается в том, чтобы уменьшить смещение и улучшить работу датчика, подняв магнит с большим зазором.
В моем Braava Jet 240 мне повезло. Магниты, похоже, крепятся с помощью какой-то растягивающейся субстанции. Благодаря этому я смог провести тонкой плоской отверткой по бокам магнита и подтолкнуть его вверх, пока он не оказался на высоте своего прямоугольного пластикового корпуса.
Я собрал Braava Jet 240, и он продолжил чистить пол на моей кухне без единой заминки.
Если у вас есть другие способы поднять магниты в корпусе, пожалуйста, напишите о них в комментариях, и я включу их в текст. Мне неясно, как долго магнит будет оставаться в поднятом положении, учитывая, что клей эластичен.
Через две недели… Ответ: около двух недель. Что изменилось, так это то, что дикая траектория движения Braava Jet 240 теперь повторяется. Это похоже на ошибку программного обеспечения. Возможно, сам индуктивный датчик медленно выходил из строя, и я вернул его к полезной жизни в течение последних двух недель его траектории отказа. Я сообщу, если смогу решить эту новую ситуацию.
Шаг 1 Батарея

Выключите устройство.
Шаг 2


Пальцами аккуратно извлеките аккумулятор.
Шаг 3 Насадка для швабры


Поднимите ручку, чтобы открыть кнопку извлечения.
Шаг 4



Пальцем сдвиньте кнопку извлечения вперед.
Шаг 5

Наклоните робота на бок и дайте коврику выскользнуть.
Шаг 6 Передняя панель


Отверткой Phillips #1 выкрутите два винта диаметром 22,0 мм на нижней части передней панели робота.
Шаг 7


С помощью отвертки Phillips #1 и инструмента для открывания iFixit открутите два винта диаметром 15,0 мм на передних сторонах робота.
Шаг 8



Осторожно потяните назад передний корпус, чтобы снять его с робота.
Шаг 9 Задняя оболочка


Вставьте отвертку Phillips #1 в отверстия для винтов.
Открутите два винта диаметром 9,7 мм.
Шаг 10


Открутите четыре винта 9,7 мм с помощью крестообразной отвертки с длинной шейкой №1.
Если винты откручиваются, но не выходят легко, переверните робота вверх дном и осторожно потрясите его.
Шаг 11



Потяните вверх задний корпус, чтобы снять его с робота.
При сборке верните на место курок выброса накладок, если он выпал при снятии заднего корпуса.
Шаг 12 Снимите пружину рычага выброса подушечки

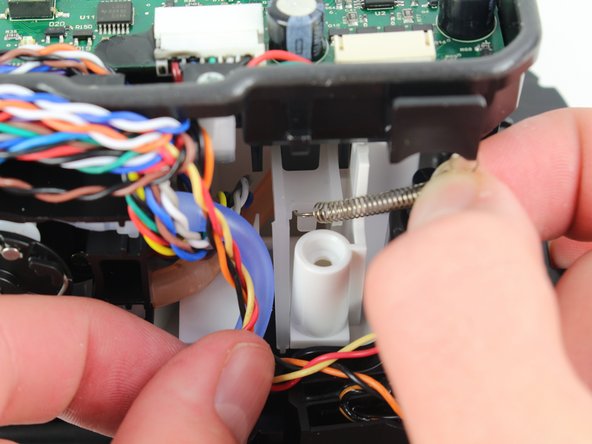
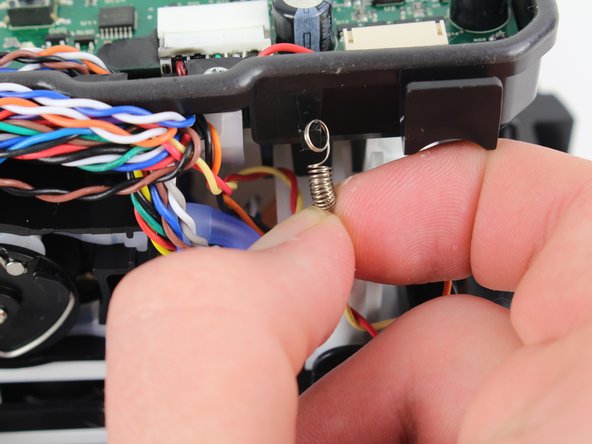
Сначала потяните пружину вверх, а затем вниз, чтобы отсоединить ее от крючков.
Шаг 13 Снимите корпус материнской платы

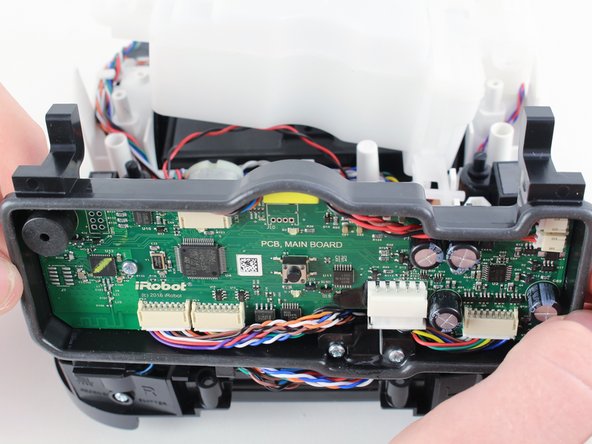

Поднимите корпус материнской платы и потяните его вперед, чтобы извлечь из устройства. При этом обнажится свободно плавающая платформа, а также моторы, трубки с водой и магнитные датчики.
Шаг 14 Отрегулируйте высоту магнитных датчиков

Осторожно подденьте магниты, чтобы поднять их по отношению к свободно плавающей платформе, но не настолько, чтобы они терлись о дно корпуса материнской платы.
Идея заключается в том, чтобы уменьшить зазор между магнитом и корпусом материнской платы, чтобы улучшить работу индуктивного датчика.
