
Даже опытные инженеры часто имеют не совсем верное представление о шаговых электродвигателях и способах управления ими. В данной статье мы разберем лишь несколько основных заблуждений что, надеюсь, поможет и новичкам и бывалым инженерам при выборе драйверов управления. Было бы хорошо разобрать все особенности, но тогда эта статья превратилась бы в книгу.
В этой статье речь пойдет о биполярных шаговых электродвигателях, поскольку они являются наиболее популярными в использовании на сегодняшний день. Униполярные шаговые электродвигатели все еще используются в некоторых устройствах, однако их популярность с каждым годом снижается. Это снижение обуславливается преобладанием относительно недорогих драйверов для биполярных двигателей. Учитывая снижение стоимости управления, почему бы не использовать биполярные шаговые электродвигатели? В конце концов у них есть еще один плюс – больший крутящий момент.
Температура
Многие инженеры ошибочно полагают, что если шаговый электродвигатель имеет небольшой размер, значит, его температура тоже должна быть небольшой. Этот миф легко развеять, взяв документацию на электрическую машину, пирометр, и произвести замер. То, что при касании может показаться «очень горячим», на самом деле не будет даже подходить к максимально допустимой температуре машины. Шаговые электродвигатели обычно имеют повышенную температуру, это связано с внутренними процессами в самой машине. Даже когда они не вращаются они также подвержены потерям. Тем не менее, если вы сомневаетесь – перестрахуйтесь и проверьте температуру. Естественно, если температура превысит предельно допустимую, указанную в паспорте, это может привести к необратимым последствиям (выход из строя или значительное сокращение срока службы).

В случаях, когда есть необходимость снизить потребление электроэнергии в режиме простоя, можно использовать специальные драйверы, в которые данная функция включена. Однако это повлияет не только на значение тока в обмотках, но и на удерживающий момент, что в определенных механизмах тоже важно.
Микрошаговый режим
Микрошаги это не магия. Существуют специальные драйверы для микрошагового управления. Это позволяет увеличить точность позиционирования, однако достигается за счет значительного крутящего момента. Кроме того, наличие драйвера, обеспечивающего шаг 1/32, не значит, что ваш электродвигатель сможет это реализовать. После определенного порога (1/10 и иногда 1/16) требуются высококачественные драйверы и двигатели. Даже если ваш шаговый электродвигатель и драйвер смогут реализовать микрошаг в 1/32, возможно ли это интегрировать в общую систему управления?

Рассмотрим следующий пример. Линейное перемещение с 10 шагами на дюйм ходового винта напрямую соединенного с типичным шаговым двигателем, имеющим 200 шагов на оборот. Каждый полный шаг электрической машины будет переведен в 0,0005 дюйма линейного движения. Казалось бы, что, якобы, та же система микрошагов 1/32 сможет уменьшить линейный шаг до 0,000015. Но в реальности реализации данной системы практически не возможна, так как упругость и силы трения не позволят преобразовать настолько миниатюрные шаги к линейному движению.
Микрошаговый режим реально полезен при проверке системы с шаговой электрической машиной на резонанс. Это дает определенные возможности для избегания резонанса. Как известно, любая механическая система имеет резонансную частоту. Для шаговых электродвигателей достижение этой частоты, как правило, происходит на определенной скорости, после чего двигатель начнет сильно шуметь. Эти шумы могут привести к «пропусканию шагов», что чревато серьезными последствиями для определенных систем. В некоторых случаях это может привести к слишком большим вибрациям. В случаях с режущими машинами, такими как токарные станки, этот звук можно спутать с рабочим звуком обработки поверхности заготовки. Микрошаговый режим уменьшает расстояние пройденное валом между шагами (на появление шумов тратится меньше энергии).
Номинальное напряжение и напряжение питания
Наверное, одним из самых запутанных моментов является несоответствие напряжения на обмотке, указанного в паспорте машины, и реального напряжения источника питания, используемого для питания электрической машины. Если в техпаспорте указывается напряжение обмотки равное 3,4 В, то как получается, что электродвигатель подключается к источнику 48 В постоянного тока? Или иногда и к 80 В.
Номинальное напряжение не настолько критично, обратите внимание на ток.
Такое подключение стало возможным благодаря тому, что большинство современных драйверов имеют встроенное ШИМ управление выходным напряжением. Драйверы контролируют ток обмотки. Когда ток доходит до максимального значения (определяется максимальным током электрической машины), драйвер отключает питание, или снижает значение тока. При этом превышать максимальное напряжение драйвера нельзя.
Рассмотрим небольшой пример на основе шагового электродвигателя с номинальными данными: Uн = 12 В, Iн = 0,33 А, активное сопротивление обмотки R = 32,6 Ом, реактивное сопротивление обмотки L = 48 мГн.
12 В – это не максимально допустимое напряжение. Это напряжение нормальной работы, при котором в обмотке будет протекать ток равный 0,33 А.
Если вы управляете электрической машиной с помощью очень простого или Н-мостового драйвера, то вам необходимо ограничивать напряжение 12 В для предотвращения превышения номинального тока.
В случае использования драйвера с прерывателем (chopper drive), превышение номинального напряжения не является проблемой. Чем выше будет напряжение – тем быстрее машина достигнет магнитного насыщения. Приведенная ниже формула это иллюстрирует:

Приведенная формула вычисляет ток обмотки электродвигателя за определенный промежуток времени.

Ток, через катушку индуктивности 50 мГн, в течении 1 мс увеличивается пропорционально напряжению.
Если двигатель «перешагнет» прежде, чем сможет достаточно насытиться для развития необходимого момента, он начнет «терять» шаги. Если вы обнаружите, что такое происходит с вашей машиной на большом ходу – рассмотрите вариант повышения напряжения питания.




Вопрос: Что такое шаговый двигатель и для чего он?
Ответ: Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы.
Вопрос : Какие достоинства у шаговых двигателей?
Ответ: Достоинства истекают из особенностей конструкции:
— Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи — поворот ротора зависит от числа поданных импульсов на устройство управления;
— высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается;
— хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников;
— обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора;
— работа в широком диапазоне скоростей, т.к. скорось напрямую зависит от количества входных импульсов.
Недостатки
— шаговый двигатель подвержен резонансу;
— может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе
— низкая удельная мощность шагового привода;
— потребляемая энергия не уменьшается при отсутствии нагрузки;
— малый момент на высоких скоростях;
Вопрос : Какие бывают шаговые двигатели?
Ответ: Шаговых двигателей существует множество разновидностей. В настоящее время 95% всех шаговых двигателей — гибридные. В зависимости от конфигурации обмоток двигатели делятся:
а)Биполярный — имеет четыре выхода, содержит в себе две обмотки.
б)Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
в)Четырехобмоточный — имеет четыре независимые обмотки. Можно представлять его как униполярный, обмотки которого разъединены, а если соединить соседние отводы — получим биполярный двигатель.

В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
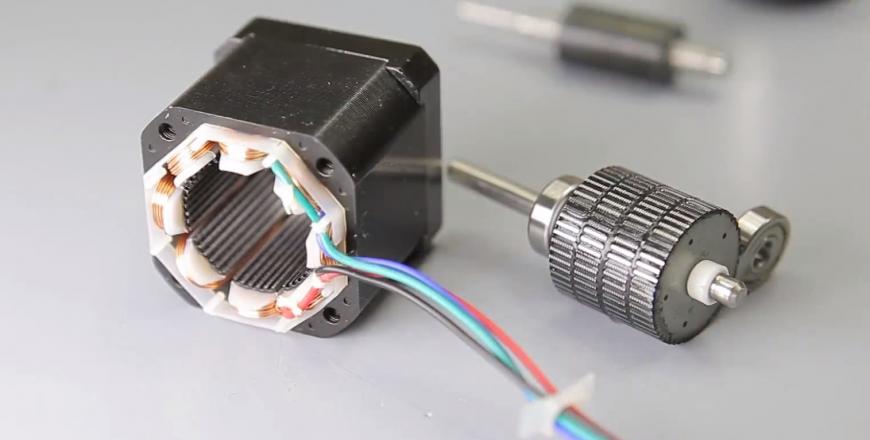
Вопрос: Корпус у меня не разборный, а хочется посмотреть что внутри!
Ответ: Внутри находятся обмотки, зубчатый ротор и несколько подшипников. Не стоит разбирать рабочий двигатель. Ротор устанавливается с малым зазором, кроме того, система ротор-статор образует замкнутый магнитопровод, который намагничивается в собранном состоянии, и двигатель после разборки теряет существенную часть момента.
Вопрос : Какие существуют программы для работы с шаговыми двигателями?
Ответ: Их существует множество как перемещение на определенный шаг, так для трехмерного использования. Могут управлять от одного до шести двигателей. Например MACH3, LinuxCNC, Turbocnc, NC Studio.
Вопрос : Как можно повысить точность вращения вала шагового двигателя?
Ответ: Есть режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Однако, деление шага не всегда приводит к увеличению точности. Погрешность установки вала всегда равна указанному производителем значению (обычно 5% от полного шага), вне зависимости от микрошага. Кроме того, точность установки снижается, если ток в одной из обмоток близок к нулю. В результате точность увеличивает деление шага до примерно 8-10 микрошагов (деление 1/8 или 1/10). Большие значения приводят лишь к увеличению плавности хода.
Вопрос : Что означают характеристики шагового двигателя — ток, индуктивность, напряжение и т.п.?
Ответ: Все характеристики двигателя находятся в тесной взаимосвязи и определяют главную — кривую зависимости крутящего момента от скорости. Рассматривать влияение характеристик надо для двигателей одного размера. Момент удержания — пиковое значение крутящего момента двигателя — зависит от тока и индуктивности обмотки. Чем больше индуктивность, тем больший момент удержания можно развить, но тем больше требуется напряжение питания на высоких скоростях, чтобы преодолеть индуктивное сопротивление и закачать нужный ток в обмотку. Ток обмотки также определяет выбор драйвера шагового двигателя. Напряжение питания обмотки равно U = I*R, номинальному току обмотки умноженному на напряжение и показывает, какое постоянное напряжение надо подать на обмотку, чтобы получить номинальный ток и, соответственно, момент удержания. Величина напряжения используется при выборе драйвера и характеристик источника питания.
Вопрос Какой шаговый двигатель лучше, А или Б?
Ответ: Этот вопрос неоднозначен, но все же дадим пару рекомендаций. Как правило, ориентироваться надо не на момент удержания, а на индуктивность. Лучше работают те двигатели, у которых индуктивность меньше — большинство задач требуют момента на высоких скоростях, и малая индуктивность требует меньшего напряжения питания. Нормальной индуктивностью можно считать 2-5 мГн для двигателей NEMA23 (фланец 57 мм), 4-6 мГн для двигателей NEMA34 (фланец 86 мм). Если А и Б — двигатели разного размера, смотрите кривую зависимости момента от скорости — чем она более пологая, тем лучше.
Вопрос : Что такое драйвер управления шаговым двигателем?
Ответ: Драйвера шаговых двигателей используются для управления биполярными и униполярными шаговыми двигателями с полным шагом, половинным и микрошагом. Они действуют как посредники между компьютером и двигателем и должны подбираться по напряжению и уровню мощности, типу сигнала (аналоговый и цифровой). Тип двигателя является самым важным фактором при выборе драйвера. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют две обмотки через которые ток проходит поочередно. Шаговые двигатели с полным шагом приводятся в движение благодаря изменениям магнитного поля относительно ротора. Полушаговые двигатели в свою очередь действуют также, как двигатели с полным шагом однако угловое перемещение ротора составляет половину шага полношагового двигателя. На каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла. Микрошаговые или минишаговые двигатели отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В драйверах минишаговых и микрошаговых двигателей используются электронные методы улучшения позиционного решения системы управления. Драйвера шаговых двигателей отличаются по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам. Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током. Драйвера для шаговых двигателей могут быть однофазными или трех фазными с частотой в 50, 60, или 400 Гц. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров. В других используются джойстики, цифровые пульты управления, компьютерные интерфейсы, или слоты для карт PCMCIA (Международная ассоциация производителей карт памяти для персональных компьютеров). Программы контроля могут быть сохранены на передвижных, энергонезависимых носителях данных. Переносные блоки управления разработаны для управления с удаленных точек. Также доступно беспроводное и WEB управления. Форма драйверов позволяет сборку модуля в нескольких конфигурациях. Большинство устройств могут монтироваться на шасси, контактные DIN рельсы, панели, стойки, стены или печатные платы (PCB). Также возможна установка автономных устройств и интегральных микросхем, которые монтируются на печатные платы. Особенности драйверов: подавление резонанса; вспомогательные входы/выходы (I/O); мягкий старт; автонастройка, самодиагностика и проверка состояния; а так же сигнализация в таких случаях как перенапряжение.
В драйверах используют много различных типов шин и коммуникационных систем. Шинные типы: (ATA), (PCI), (IDE), (ISA), (GPIB), (USB) и (VMEbus). Коммуникационные стандарты: ARCNET, AS-i, Beckhoff I/O, CANbus, CANopen, DeviceNet, Ethernet, (SCSI) и (SDS). Также доступно большое количество последовательных и параллельных интерфейсов. Соответствующая статья поможет подобрать драйвер.
Вопрос : Как узнать, подходит ли двигатель А к драйверу Б
Ответ: Чтобы это узнать, сделайте следующее:
1) проверьте, может ли драйвер выдавать ток фазы, равный(или примерно равный)току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя — драйвер не подходит.
2) Вычислите максимальное напряжение питания двигателя по формуле Umax = 32 * sqrt (L), где L — индуктивность обмоток двигателя в миллигенри(указывается производителем). Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся.
Пример:подходит ли UIM24008 для двигателя ST86-150? Ток обмотки двигателя — 5.6 А, ток, выдаваемый драйвером — до 8А, первое условия выполнено. Индуктивность двигателя — 9.2 мГн, по формуле получаем Umax = 32 * sqrt(9.2) = 97 Вольт. Максимальное напряжение питания драйвера — всего 40 Вольт. Это означает, что двигатель будет отдавать момент только на низких оборотах, а для получения качественного движения необходимо использовать или драйвер с напряжением питания до 80-90 Вольт (например, AM882 или YKC2608M-H), или двигатель с меньшей индуктивностью, например ST86-80.
Вопрос : У меня перегревается двигатель, что делать?
Ответ: Для начала надо определить, действительно ли двигатель перегревается. Многие воспринимают рабочую температуру двигателя как перегрев, потому что её "не терпит рука", тогда как нагрев до 80 градусов — рабочая ситуация для шагового двигателя. Необходимо замерить реальную температуру. Если она меньше 70 градусов — беспокоиться не стоит. Если между 70 и 80 — Ваш двигатель работает на пределе температурного режима, но тоже особых поводов для беспокойства нет. Если больше 80 — первое, что необходимо проверить, это выставленный рабочий ток на драйвере. Он должен соответствовать номинальному току двигателя, или быть чуть-чуть меньше Также можно использовать функцию снижения тока обмоток в режиме удержания. К снижению нагрева приводит и снижение питающего напряжения, однако, и момент на высоких оборотах тоже снизится. Если нет возможности жертвовать динамикой двигателя, остается единственный способ — установить на корпус ШД радиатор и/или вентилятор.
Вопрос : Шаговый двигатель постоянно пропускает шаги. Что делать?
Ответ: Пропуск шагов — самая неприятная проблема у шаговых приводов. Причин может быть множество. В порядке убывания распространенности
- Некачественный блок управления двигателем(драйвер). Не стоит недооценивать сложность управления шаговым двигателем. Разница в работе драйвера Leadshine и кустарной поделки — очень велика. Особенно это заметно при работе в области резонанса.
- Неверные настройки драйвера. Неверно выбранный ток и прочие опции — могут приводить к пропуску шагов. Проверьте все настройки еще раз.
- Недостаточное напряжение питания. С повышением скорости врашения ШД теряет динамику. Чем выше напряжение — тем выше можно добиться скорости вращения без пропусков шагов.
- Двигатель перегружен. Нагрузка на двигатель слишком велика. Снизьте ускорение и скорость или поставьте двигатель побольше.
- Механическая часть(направляющие, передачи) подклинивает
- Дребезг на контактах управляющих сигналов STEP/DIR или наводки от инвертора/плазмотрона.
- Проблемы с генерацией сигналов STEP/DIR. Это целое отдельное семейство проблем, которое достойно отдельного обсуждения. Три самых распространенных проблемы — малая длительность сигналов(для драйверов указывается рекомендуемая длительность импульса), слишком растянутый фронт импульса, или слишком поздняя смена DIR при смене направления движения(эта проблема есть у Mach3 при работе от LPT) — при использовании медленных оптопар это приводит к тому, что драйвер делает еще один шаг в том же направлении, тогда как должен уже шагать в противоположном.
- Бракованный драйвер(например, входная оптопара не успевает отрабатывать фронты сигнала).
- Бракованный двигатель. Прозвоните обмотки, проверьте их сопротивление(должно совпадать с паспортным). Проверьте вращение вала рукой — при разомкнутых обмотках вал отключенного двигателя должен вращаться легко и беззвучно, при замкнутых накоротко вал крутиться не должен.
- Иногда за пропуск шагов принимают проскальзывание шестерни на валу или муфты, соединяющей вал двигателя с винтом передачи.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Шаговый двигатель в первую очередь спроектирован не для того, что бы он просто вращался и передавал свой вращающий момент исполнительному механизму. Он должен обеспечивать высокую точность позиционирования и достаточный момент удержания.
Удерживающий момент — это то, с какой силой двигатель, если на него подан номинальный ток, будет сопротивляться попыткам его провернуть. Если подать на двигатель ток равный номинальном, это обеспечивает максимальный момент удержания.
Угол поворота — это угол поворота, на который двигатель поворачивается за один шаг (кто бы мог подумать?). Потому, иногда, его просто называют шагом и не парятся. А погрешность шага — это максимальное отклонение от заданного угла поворота в процентах.
Выходит, что чем мельче шаг, тем круче и точнее? Нет! Шаг в 1.8 градуса это всё, что вам нужно. Не буду сейчас приводить таблицы и примеры расчёта перемещений исполнительных механизмов на разных моделях принтеров и разных кинематиках. Поверьте мне на слово, лучше смотрите на погрешность шага, пользы будет больше. 5% — очень и очень хороший показатель.
И тут можно задаться вопросом, — ‘а как же напряжение?’. Напряжение особой роли не играет, т.к. его регулирует драйвер шагового двигателя, что бы поддерживать необходимый ток. Но знайте меру. 3V — 5V вполне достаточно, 3.4V, наверное, в самый раз.
Есть ещё такой параметр, как количество фаз. Ну, если совсем просто, то это сколько контактов/проводов торчит из двигателя. По хорошему, нам для принтера нужны биполярные двигатели с 4-мя фазами (проводами). Но существуют и с 6-тью и, даже, с 8-мью. Последние — экзотика в наших краях (ну я по крайней мере вообще их в руках не держал). А вот те, что с 6-тью проводами — те встречаются. Если просто, то это тоже самое, что и с 4-мя, но на обеих обмотках есть центральный отвод. Более наглядно можно посмотреть на иллюстрации, которую я честно где-то стырил.

Но я так и не сказал, что брать? Если есть 4-выводной, берём его, если нет, не расстраиваемся и берём 6-выводной. Но лучше берите 4-выводной (мороки меньше). Кстати, на картинке 8-выводной двигатель показан в режиме, когда у него пары обмоток подключены параллельно.
О чём ещё не сказал? О размерах? Ну разве ими кого-то удивишь? Наш типоразмер это Nema17, тут ничего нового. Можно и другие, но это уже снова экзотика.
Ну и последнее. Вот я купил двигатель, а дальше что? Как на нём правильно настроит ток? А всё очень просто, я уже поверхностно описывал этот процесс в одном из своих постов. Нам понадобится мультиметр, отвёртка и немного математики. Настройка тока производится методом кручения подсроечника на драйвере и снятия контрольного напряжения. Напряжение можно снимать — как на картинке.
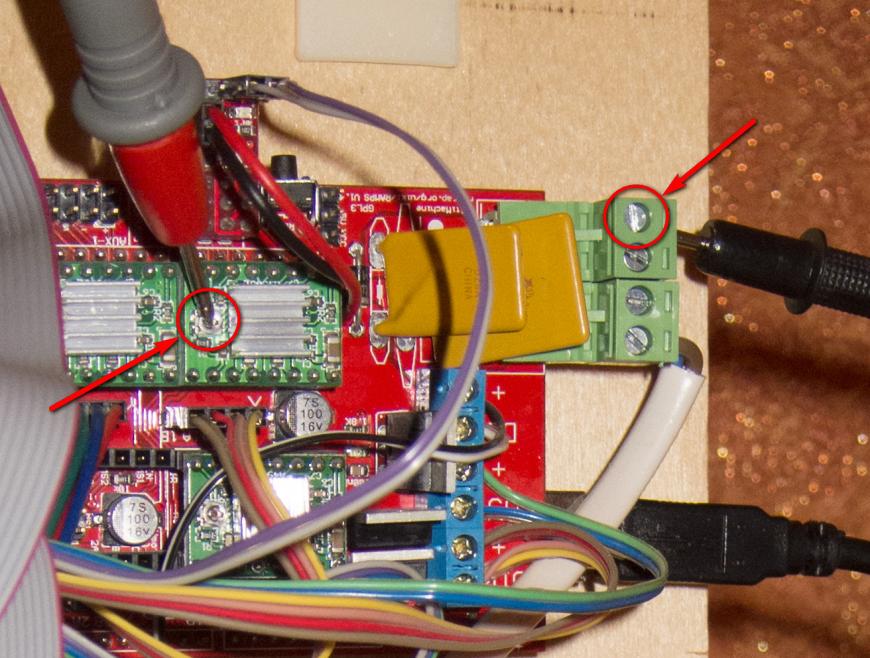
А дальше считаем по формуле, какое контрольное напряжение (Vr) нам надо выставить. Формула различается для разных драйверов.
Vr = Номинальный ток / 2,5
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 .5 = 0.68V
Vr = Номинальный ток / 2
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 = 0,85V
